
 Το έργο MOTION (iMage and lidar fusiOn for vehicle exTerior InspectiON) είναι μια καινοτόμος λύση για την επιθεώρηση της εξωτερικής επιφάνειας οχημάτων, αξιοποιώντας σύγχρονες τεχνικές επεξεργασίας εικόνας. Χρηματοδοτούμενο από το πρόγραμμα Horizon 2020 της Ευρωπαϊκής Ένωσης, συνδυάζει αλγορίθμους συνένωσης εικόνων, Structure from Motion (SfM) και συνταύτισης εικόνων εύρωστης σε μεταβολές φωτισμού, βελτιώνοντας έτσι την ακρίβεια και αποδοτικότητα των επιθεωρήσεων.
Το έργο MOTION (iMage and lidar fusiOn for vehicle exTerior InspectiON) είναι μια καινοτόμος λύση για την επιθεώρηση της εξωτερικής επιφάνειας οχημάτων, αξιοποιώντας σύγχρονες τεχνικές επεξεργασίας εικόνας. Χρηματοδοτούμενο από το πρόγραμμα Horizon 2020 της Ευρωπαϊκής Ένωσης, συνδυάζει αλγορίθμους συνένωσης εικόνων, Structure from Motion (SfM) και συνταύτισης εικόνων εύρωστης σε μεταβολές φωτισμού, βελτιώνοντας έτσι την ακρίβεια και αποδοτικότητα των επιθεωρήσεων.
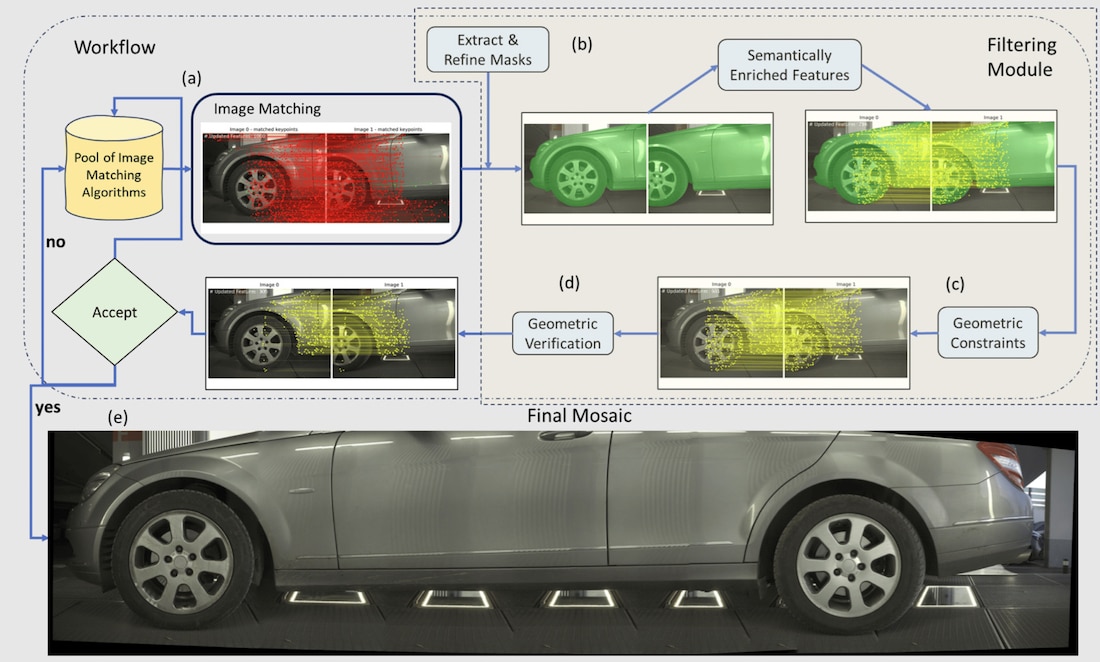
![]() Στο πλαίσιο του έργου, αναπτύχθηκε ο Fast Image Stitching Algorithm (FISA), που επιτρέπει την δημιουργία πανοραμικών εικόνων οχημάτων για ταχεία επιθεώρηση, ενώ μέσω της μεθόδου SfM ανακατασκευάζεται τρισδιάστατα το μοντέλα του οχήματος, συνδέοντας εικόνες 2D με συντεταγμένες οχήματος μέσω δεδομένων LiDAR και καμερών.
Στο πλαίσιο του έργου, αναπτύχθηκε ο Fast Image Stitching Algorithm (FISA), που επιτρέπει την δημιουργία πανοραμικών εικόνων οχημάτων για ταχεία επιθεώρηση, ενώ μέσω της μεθόδου SfM ανακατασκευάζεται τρισδιάστατα το μοντέλα του οχήματος, συνδέοντας εικόνες 2D με συντεταγμένες οχήματος μέσω δεδομένων LiDAR και καμερών.
Το σύστημα συνταύτισης εικόνων, ενσωματώνοντας τεχνικές βαθιάς μάθησης όπως η RoMa και YOLOv8, εξασφαλίζει υψηλή ακρίβεια αναγνώρισης χαρακτηριστικών, παρά τις προκλήσεις φωτισμού.
 Τα αποτελέσματα του MOTION επικυρώθηκαν μέσω δοκιμών και το σύστημα ενσωματώθηκε στο οικοσύστημα ASSIST-IoT. Αναπτύχθηκε επίσης σχετικό API για την εύκολη διασύνδεση με άλλα συστήματα. Επιπλέον, το έργο διερεύνησε εμπορικές δυνατότητες, αναγνωρίζοντας αγορές-στόχους, ωστόσο προτεραιότητα δόθηκε στην ανάπτυξη μιας ερευνητικά προσανατολισμένης λύσης για την αυτοκινητοβιομηχανία.
Τα αποτελέσματα του MOTION επικυρώθηκαν μέσω δοκιμών και το σύστημα ενσωματώθηκε στο οικοσύστημα ASSIST-IoT. Αναπτύχθηκε επίσης σχετικό API για την εύκολη διασύνδεση με άλλα συστήματα. Επιπλέον, το έργο διερεύνησε εμπορικές δυνατότητες, αναγνωρίζοντας αγορές-στόχους, ωστόσο προτεραιότητα δόθηκε στην ανάπτυξη μιας ερευνητικά προσανατολισμένης λύσης για την αυτοκινητοβιομηχανία.
Τίτλος Έργου: MOTION – Συνδυασμός Lidar Και Εικόνων για την Εξωτερική Επιθεώρηση Οχημάτων
Χρονική Διάρκεια Έργου: 9 μήνες (08-05-2023 έως 08/02/2024)
Πλαίσιο & Ποσό Χρηματοδότησης Έργου: Horizon 2020), open call υπό το έργο Assist-IoT, 60.000 €
Επιστημονικός Υπεύθυνος (Πα.Δ.Α.): Αναπλ. Καθηγητής Λάζαρος Γραμματικόπουλος
Κοινοπραξία – Συνεργαζόμενοι Φορείς: ΠΑΔΑ (Ερευνητική Μονάδα Φωτογραμμετρίας, Τμήμα Μηχανικών Τοπογραφίας και Γεωπληροφορικής)
Ερευνητικές Δημοσιεύσεις/ Αποτελέσματα / Πατέντες:
Τα αποτελέσματα του έργου είναι:
- Ανάπτυξη προηγμένων αλγορίθμων Συνένωσης Εικόνων (Fast Image Stitching Algorithm – FISA), Συνταύτισης Εικόνων (Image Matching Framework) και Ανακατασκευής 3D Μοντέλων μέσω Structure from Motion (SfM).
- Χρήση αλγορίθμων Τεχνητής Νοημοσύνης (RoMa, YOLOv8, SAM) για τη βελτίωση της ακρίβειας επιθεώρησης.
- Αξιολόγηση του συστήματος σε πραγματικές συνθήκες.
- Δημοσίευση σε διεθνές επιστημονικό περιοδικό
El Saer, A., Grammatikopoulos, L., Sfikas, G., Karras, G. and Petsa, E., 2024. A novel framework for image matching and stitching for moving car inspection under illumination challenges. Sensors, 24(4), p.1083. (link)






")

