
 Το έργο MOTION++ επεκτείνει τη λύση του προηγούμενου έργου MOTION, στοχεύοντας στη βελτιστοποίηση της επιθεώρησης της εξωτερικής επιφάνειας οχημάτων μέσω της αξιοποίησης προηγμένων τεχνικών 3D Gaussian Splatting. Η κύρια καινοτομία του MOTION++ είναι η συγχώνευση δεδομένων RGB και χαρτών βάθους (depth maps) για τη δημιουργία ακριβέστερων, λεπτομερών και ρεαλιστικών 3D ανακατασκευών, επιτρέποντας τη σύνθεση νέων όψεων οχημάτων από μη καταγεγραμμένες γωνίες.
Το έργο MOTION++ επεκτείνει τη λύση του προηγούμενου έργου MOTION, στοχεύοντας στη βελτιστοποίηση της επιθεώρησης της εξωτερικής επιφάνειας οχημάτων μέσω της αξιοποίησης προηγμένων τεχνικών 3D Gaussian Splatting. Η κύρια καινοτομία του MOTION++ είναι η συγχώνευση δεδομένων RGB και χαρτών βάθους (depth maps) για τη δημιουργία ακριβέστερων, λεπτομερών και ρεαλιστικών 3D ανακατασκευών, επιτρέποντας τη σύνθεση νέων όψεων οχημάτων από μη καταγεγραμμένες γωνίες.
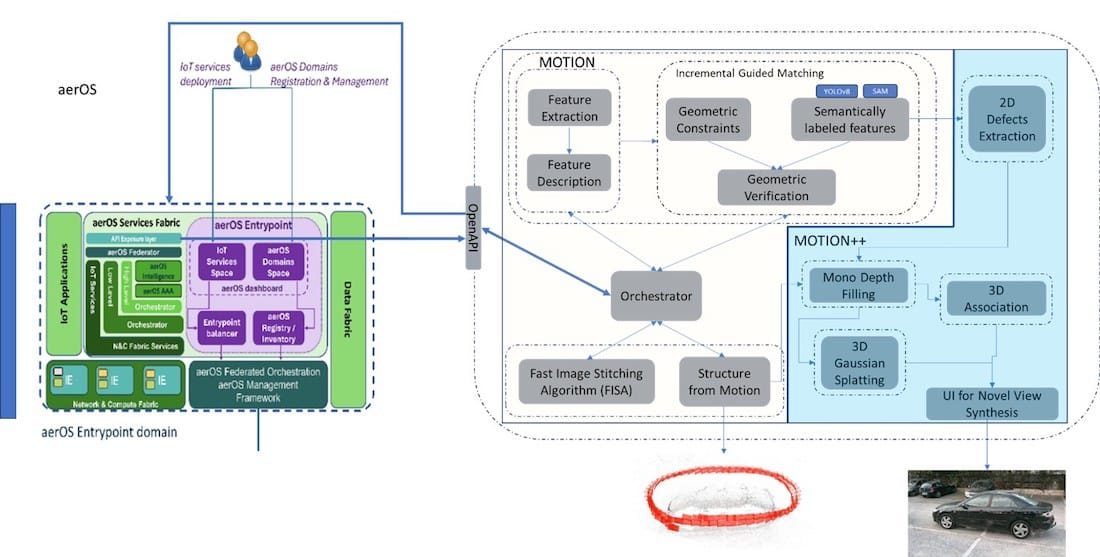
![]() Η λύση MOTION++ βασίζεται σε ένα καινοτόμο σύστημα συλλογής δεδομένων, που συνδυάζει λήψεις από αισθητήρες RGB-D και μεταφέρει τα δεδομένα στο cloud για περαιτέρω επεξεργασία. Η διαδικασία περιλαμβάνει την εκπαίδευση μοντέλων 3D Gaussian Splatting, υπό τη διαχείριση του High-Level Orchestrator (HLO) του AerOS, το οποίο εξισορροπεί δυναμικά τους πόρους μεταξύ edge και cloud. Στη συνέχεια, ένα ελαφρύ μοντέλο μεταφέρεται πίσω στον χρήστη για επιτόπια αλληλεπίδραση, ενώ η πλήρης ανάλυση των δεδομένων πραγματοποιείται στο cloud όταν απαιτείται η σύνθεση νέων όψεων (novel view synthesis) υψηλής ανάλυσης.
Η λύση MOTION++ βασίζεται σε ένα καινοτόμο σύστημα συλλογής δεδομένων, που συνδυάζει λήψεις από αισθητήρες RGB-D και μεταφέρει τα δεδομένα στο cloud για περαιτέρω επεξεργασία. Η διαδικασία περιλαμβάνει την εκπαίδευση μοντέλων 3D Gaussian Splatting, υπό τη διαχείριση του High-Level Orchestrator (HLO) του AerOS, το οποίο εξισορροπεί δυναμικά τους πόρους μεταξύ edge και cloud. Στη συνέχεια, ένα ελαφρύ μοντέλο μεταφέρεται πίσω στον χρήστη για επιτόπια αλληλεπίδραση, ενώ η πλήρης ανάλυση των δεδομένων πραγματοποιείται στο cloud όταν απαιτείται η σύνθεση νέων όψεων (novel view synthesis) υψηλής ανάλυσης.
 Το MOTION++ βελτιώνει σημαντικά την ακρίβεια και την αποδοτικότητα της επιθεώρησης οχημάτων, επιτρέποντας στους χρήστες να αναλύουν οχήματα σε πραγματικό χρόνο από οποιαδήποτε γωνία, να συγκρίνουν παρούσες και παρελθοντικές καταστάσεις και να εξάγουν χρήσιμες πληροφορίες για πιθανές φθορές ή επισκευές. Επιπλέον, η τεχνολογία του MOTION++ μπορεί να επεκταθεί εύκολα και σε άλλους τομείς, όπως η βιομηχανία και η κατασκευή, ενισχύοντας τη βιωσιμότητα του έργου.
Το MOTION++ βελτιώνει σημαντικά την ακρίβεια και την αποδοτικότητα της επιθεώρησης οχημάτων, επιτρέποντας στους χρήστες να αναλύουν οχήματα σε πραγματικό χρόνο από οποιαδήποτε γωνία, να συγκρίνουν παρούσες και παρελθοντικές καταστάσεις και να εξάγουν χρήσιμες πληροφορίες για πιθανές φθορές ή επισκευές. Επιπλέον, η τεχνολογία του MOTION++ μπορεί να επεκταθεί εύκολα και σε άλλους τομείς, όπως η βιομηχανία και η κατασκευή, ενισχύοντας τη βιωσιμότητα του έργου.
Τα αποτελέσματα του έργου θα διαχυθούν μέσω επιστημονικών δημοσιεύσεων, συνεδρίων και ανοικτού κώδικα, ενώ παράλληλα εξετάζεται η δυνατότητα εμπορικής αξιοποίησης μέσω συνεργασιών ή της δημιουργίας πανεπιστημιακού spin-off.
Τίτλος Έργου: MOTION++ – Συνδυασμός Lidar Και Εικόνων για την Εξωτερική Επιθεώρηση Οχημάτων
Χρονική Διάρκεια Έργου: 8 μήνες (03-12-2024 έως 08/08/2025)
Πλαίσιο & Ποσό Χρηματοδότησης Έργου: Horizon 2021-2022, open call υπό το έργο aerOS Project, 60.000 €
Επιστημονικός Υπεύθυνος (Πα.Δ.Α.): Αναπλ. Καθηγητής Λάζαρος Γραμματικόπουλος
Κοινοπραξία – Συνεργαζόμενοι Φορείς: ΠΑΔΑ (Ερευνητική Μονάδα Φωτογραμμετρίας, Τμήμα Μηχανικών Τοπογραφίας και Γεωπληροφορικής)
Ερευνητικές Δημοσιεύσεις/ Αποτελέσματα / Πατέντες:
Τα αποτελέσματα του έργου είναι:
- Ανάπτυξη του συστήματος που θα αποτελεί τον βασικό συλλέκτη δεδομένων RGB-D για την εκπαίδευση των μοντέλων 3D Gaussian Splatting.
- Ενσωμάτωση τεχνικών 3D Gaussian Splatting για την παραγωγή νέων όψεων οχημάτων από γωνίες που δεν έχουν αρχικά καταγραφεί.
- Δοκιμή και αξιολόγηση του συστήματος σε πραγματικές συνθήκες.
- Συμμετοχή σε τουλάχιστον ένα συνέδριο και δημοσίευση επιστημονικής εργασίας σε περιοδικό ή συνέδριο – έχει υποβληθεί αρχική δημοσίευση και είναι υπό αξιολόγηση-.
- Δημιουργία white paper που θα περιγράφει τη μεθοδολογία και τα αποτελέσματα του έργου.
Πιθανή κατοχύρωση δικαιωμάτων πνευματικής ιδιοκτησίας για καινοτόμες προσεγγίσεις σε image stitching, Structure from Motion και 3D Gaussian Splatting.






")

