
 The MOTION project (iMage and lidar fusiOn for vehicle exTerior InspectiON) is an innovative solution designed to enhance vehicle exterior inspection through cutting-edge image processing techniques. Funded under the European Union’s Horizon 2020 program, it integrates advanced algorithms for image stitching, Structure from Motion (SfM), and illumination-invariant image matching to improve the accuracy and efficiency of defect detection in vehicle inspections.
The MOTION project (iMage and lidar fusiOn for vehicle exTerior InspectiON) is an innovative solution designed to enhance vehicle exterior inspection through cutting-edge image processing techniques. Funded under the European Union’s Horizon 2020 program, it integrates advanced algorithms for image stitching, Structure from Motion (SfM), and illumination-invariant image matching to improve the accuracy and efficiency of defect detection in vehicle inspections.
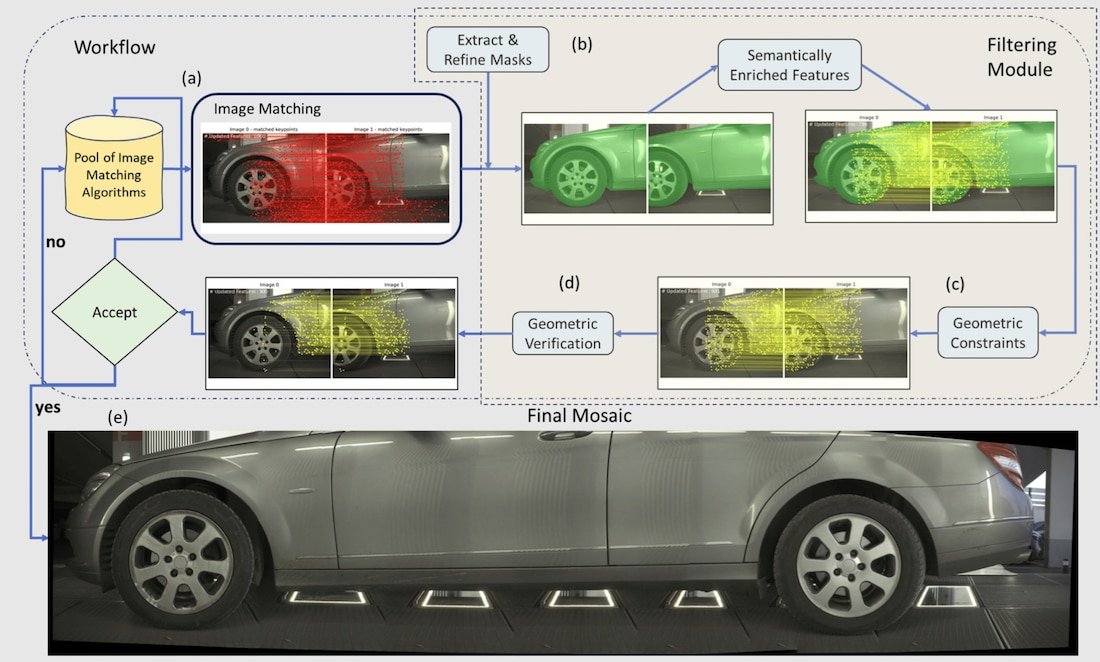
![]() The project developed a Fast Image Stitching Algorithm (FISA) to create seamless panoramic images of vehicles, to facilitate quick inspections. Additionally, the Structure from Motion (SfM) component reconstructs a 3D model of vehicles, aligning 2D images with vehicle coordinates using LiDAR data and cameras.
The project developed a Fast Image Stitching Algorithm (FISA) to create seamless panoramic images of vehicles, to facilitate quick inspections. Additionally, the Structure from Motion (SfM) component reconstructs a 3D model of vehicles, aligning 2D images with vehicle coordinates using LiDAR data and cameras.
The image matching framework, incorporating deep learning techniques such as RoMa and YOLOv8, ensures high-precision feature detection despite challenging lighting conditions.
 MOTION’s outcomes have been validated through extensive testing, with the system integrated into the ASSIST-IoT ecosystem. A specialized API has been developed for easy system integration. The project also explored commercialization pathways, identifying market opportunities, but prioritized delivering a research-driven solution for vehicle inspections.
MOTION’s outcomes have been validated through extensive testing, with the system integrated into the ASSIST-IoT ecosystem. A specialized API has been developed for easy system integration. The project also explored commercialization pathways, identifying market opportunities, but prioritized delivering a research-driven solution for vehicle inspections.
Project Τitle: Motion – iMage and lidar fusiOn for vehicle exTerior InspectiON ++
Project Duration: 9 months (08-05-2023 to 08/02/2024)
Project Framework & Funding: Horizon 2020, Open call under the Assist-IoT Project, €60,000
Scientific coordinator (UNIWA): Associate Professor Lazaros Grammatikopoulos
Consortium – Partners: UNIWA (Photogrammetry Research Unit, Department of Surveying and Geoinformatics Engineering)
Research Publications / Results / Patents
The project outcomes include:
- Development of advanced algorithms for Image Stitching (Fast Image Stitching Algorithm – FISA), Image Matching (Image Matching Framework), and 3D Model Reconstruction using Structure from Motion (SfM).
- Utilization of Artificial Intelligence algorithms (RoMa, YOLOv8, SAM) to enhance inspection accuracy.
- Testing and evaluation of the system under real-world conditions.
- Publication in an international scientific journal:
El Saer, A., Grammatikopoulos, L., Sfikas, G., Karras, G., and Petsa, E., 2024. A novel framework for image matching and stitching for moving car inspection under illumination challenges. Sensors, 24(4), p.1083. (link)






")


")