
 The MOTION++ project extends the solution of the previous MOTION project, aiming to optimize vehicle exterior inspection by leveraging advanced 3D Gaussian Splatting techniques. The main innovation of MOTION++ is the fusion of RGB data and depth maps, enabling the creation of more accurate, detailed, and realistic 3D reconstructions, allowing for the synthesis of new vehicle views from previously unrecorded angles.
The MOTION++ project extends the solution of the previous MOTION project, aiming to optimize vehicle exterior inspection by leveraging advanced 3D Gaussian Splatting techniques. The main innovation of MOTION++ is the fusion of RGB data and depth maps, enabling the creation of more accurate, detailed, and realistic 3D reconstructions, allowing for the synthesis of new vehicle views from previously unrecorded angles.
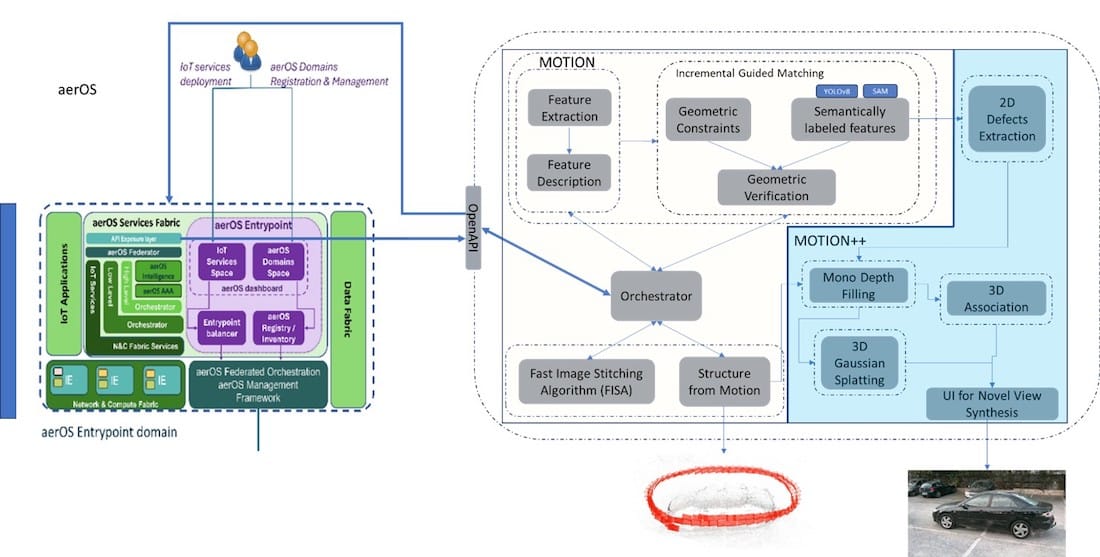
![]() The MOTION++ solution is based on an innovative data collection system, combining captures from RGB-D sensors and transferring the data to the cloud for further processing. This process includes the training of 3D Gaussian Splatting models, managed by the High-Level Orchestrator (HLO) of AerOS, which dynamically balances edge-cloud resources. A lightweight model is then transferred back to the user for on-site interaction, while high-resolution novel view synthesis is performed in the cloud when required.
The MOTION++ solution is based on an innovative data collection system, combining captures from RGB-D sensors and transferring the data to the cloud for further processing. This process includes the training of 3D Gaussian Splatting models, managed by the High-Level Orchestrator (HLO) of AerOS, which dynamically balances edge-cloud resources. A lightweight model is then transferred back to the user for on-site interaction, while high-resolution novel view synthesis is performed in the cloud when required.
 MOTION++ significantly improves the accuracy and efficiency of vehicle inspection, allowing users to analyze vehicles in real time from any angle, compare current and past conditions, and extract valuable insights regarding potential damages or necessary repairs. Furthermore, the MOTION++ technology can be easily extended to other sectors, such as industry and manufacturing, enhancing the project’s sustainability and impact.
MOTION++ significantly improves the accuracy and efficiency of vehicle inspection, allowing users to analyze vehicles in real time from any angle, compare current and past conditions, and extract valuable insights regarding potential damages or necessary repairs. Furthermore, the MOTION++ technology can be easily extended to other sectors, such as industry and manufacturing, enhancing the project’s sustainability and impact.
The project results will be disseminated through scientific publications, conferences, and open-source contributions, while the potential for commercial exploitation is also being explored through collaborations or the establishment of a university spin-off.
Project Τitle: Motion++ – iMage and lidar fusiOn for vehicle exTerior InspectiON ++
Project Duration: 8 months (03-12-2024 to 08-08-2025)
Project Framework & Funding: Open call under the aerOS Project, €60,000
Scientific coordinator (UNIWA): Associate Professor Lazaros Grammatikopoulos
Consortium – Partners: UNIWA (Photogrammetry Research Unit, Department of Surveying and Geoinformatics Engineering)
Research Publications / Results / Patents
The project outcomes include:
- Development of a system that will serve as the primary RGB-D data collector for training 3D Gaussian Splatting models.
- Integration of 3D Gaussian Splatting techniques to generate new vehicle views from angles not originally captured.
- Testing and evaluation of the system under real-world conditions.
- Participation in at least one conference and submission of a scientific paper to a journal or conference – an initial paper has already been submitted and is under review.
- Creation of a white paper describing the project’s methodology and results.
- Potential intellectual property protection for innovative approaches in image stitching, Structure from Motion, and 3D Gaussian Splatting.






")


")